
Системы управления парковкой могут двигаться в сторону 3D
Города по всему миру экспериментируют с более разумными способами управления парковкой. Некоторые используют данные о занятости парковок для динамической корректировки цен, тем самым обеспечивая наличие достаточного количества мест; другие внедряют системы придорожной парковки, оснащенные наземными датчиками, интегрируя их в более широкие платформы умного города; третьи используют сетевые датчики для мониторинга тысяч отдельных парковочных мест. Эти инициативы преследуют четкую цель: уменьшить заторы на дорогах, повысить эффективность придорожных парковок и более эффективно использовать ограниченное городское пространство.
Хотя этисистемы управления парковкойбыли реализованы во многих странах мира, многие из них до сих пор полагаются на фрагментированные или неполные данные. Установка и крупномасштабное обслуживание наземных датчиков/петлевых детекторов обходятся дорого, а системы наблюдения на основе камер могут быть чувствительны к условиям освещения или вызывать проблемы конфиденциальности. Поскольку города стремятся расширить свои инициативы по умной парковке, задача заключается не просто в сборе данных, но и в том, чтобы сделать это надежно, эффективно и в масштабе.
Технология LiDAR начинает набирать популярность в секторе систем управления парковками. LiDAR — аббревиатура от Light Detection and Ranging — использует лазерные импульсы для точного сбора трехмерной информации о физической среде, тем самым обеспечивая надежную основу данных для современного управления парковками. От мониторинга занятости парковочных мест до классификации типов транспортных средств — системы на базе LiDAR позволяют операторам получать информацию о динамике парковки с уровнем детализации, с которым с трудом справляются традиционные решения.

Почему LiDAR хорошо подходит для интеллектуальных систем управления парковкой?
По своей сути LiDAR использует лазерные импульсы для измерения расстояний. Эти измерения создают плотное трехмерное представление окружающей среды, известное как «облако точек». В отличие от изображений с камеры, на эти данные не влияют условия окружающего освещения; вместо этого он описывает геометрию окружающей среды с высокой точностью.
Эти 3D-данные предлагают многочисленные преимущества для парковочных приложений.
Во-первых, LiDAR поддерживает стабильную производительность в постоянно меняющихся условиях окружающей среды. Факторы, которые обычно влияют на системы камер, такие как темнота, блики или тени, оказывают минимальное влияние на лазерные измерения. Это делает LiDAR особенно хорошо подходящим для открытых парковок, гаражей и придорожных территорий, где условия освещения меняются в течение дня.
Во-вторых, LiDAR фиксирует физические структуры, а не внешний вид. Транспортные средства, бордюры, препятствия и пешеходы распознаются как трехмерные объекты. Это позволяет алгоритмам надежно идентифицировать и отслеживать объекты без необходимости предварительного анализа двумерных изображений, которые могут быть неправильно интерпретированы.
Наконец, данные LiDAR поддерживают наблюдение с учетом конфиденциальности. Поскольку эта технология измеряет расстояние, а не визуальные детали, она не фиксирует идентифицируемые особенности, такие как человеческие лица или номерные знаки, если не дополнена дополнительными датчиками. Для муниципалитетов и операторов, к которым предъявляются строгие требования к защите данных, это может стать существенным преимуществом. В совокупности эти характеристики делают LiDAR мощной основой для систем парковки, управляемых данными.

Мониторинг занятости: LiDAR в практических приложениях систем управления парковкой.
Одним из наиболее прямых применений LiDAR на парковках является мониторинг занятости транспортных средств.
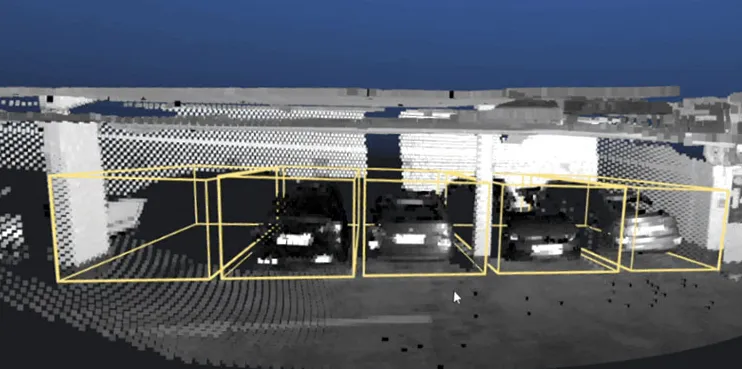
В типичном сценарии установки датчики LiDAR монтируются на существующей инфраструктуре, например на фонарных столбах или фасадах зданий, с видом на парковку или улицу. Датчики постоянно сканируют окружающую среду, генерируя поток трехмерных данных. Программное обеспечение обрабатывает эти данные в режиме реального времени для обнаружения объектов, определения их точного местоположения и классификации.
В системе можно обозначить парковочные места. Когда транспортное средство въезжает в контролируемую зону, датчики обнаруживают его в облаке точек, определяя объект, которого ранее не было. Обнаруженные точки вызывают изменение статуса занятости парковочного места. Когда транспортное средство уезжает, место снова помечается как свободное.
Благодаря чрезвычайно высокой точности данных LiDAR можно установить пороговые значения размера для объектов, обнаруженных в каждой зоне мониторинга. Это гарантирует, что небольшие объекты, такие как тележки для покупок, мусор или проходящие пешеходы, не вызовут ложных событий присутствия. Парковочное место помечается как занятое только в том случае, если обнаруженный объект превышает заданные параметры (например, типовые габариты автомобиля). Этот настраиваемый механизм фильтрации повышает точность обнаружения, обеспечивая надежные данные о занятости даже в сложных условиях, характеризующихся частым движением транспортных средств.
Поскольку LiDAR способен собирать полную пространственную информацию, один датчик часто может контролировать несколько парковочных мест одновременно. В структурированных средах, таких как парковки или тротуары с четко определенными границами, одна установка может эффективно охватить всю зону.
Хотя знание того, занято ли парковочное место, полезно, понимание того, «что» его занимает, может быть еще более ценным.
на основе LiDARсистемы управления парковкойможет классифицировать транспортные средства по их размеру и форме. Анализируя трехмерную геометрию, зафиксированную в облаке точек, алгоритмы могут различать такие категории, как легковые автомобили, фургоны, грузовики или двухколесные транспортные средства.
Эта информация открывает двери для широкого спектра практических применений. Например, операторы могут проанализировать, часто ли парковочные места у тротуаров, изначально предназначенные для краткосрочной высадки пассажиров, заняты фургонами доставки. Аналогичным образом, данные о крупных транспортных средствах могут помочь городам оценить спрос на парковку в зонах погрузки или на коммерческих парковках.
Классификация транспортных средств также способствует более эффективному правоприменению. Если правила запрещают определенным типам транспортных средств использовать определенные места, автоматизированные системы мониторинга могут отмечать потенциальные нарушения для проверки.
На парковках данные классификации транспортных средств помогают операторам понять, как транспортные средства разных размеров влияют на вместимость и эффективность транспортных потоков. Поскольку парки городских транспортных средств становятся все более разнообразными — от компактных электромобилей до больших грузовиков для доставки — эта информация становится все более важной для планирования объектов.
Важно отметить, что этот анализ основан на трехмерных характеристиках, а не на визуальном распознавании. Система может идентифицировать объект как имеющий размеры и форму фургона или грузовика без необходимости считывания номерных знаков или захвата визуальных деталей.
Индустрия парковок постепенно переходит от статической инфраструктуры к динамичному управлению, основанному на данных. Этот переход требует балансирования различных конкурирующих потребностей, включая частные транспортные средства, грузовой транспорт, услуги совместной мобильности и использование общественных пространств, в рамках ограниченной вместимости тротуаров и парковок.
Поскольку города продолжают переосмысливать роль парковок в более широкой транспортной экосистеме, технологии, способные предоставлять точные и конфиденциальные данные, будут играть все более важную роль. LiDAR быстро становится ключевым инструментом, позволяющим операторам просматривать инфраструктуру парковок через новую призму в своих системах управления парковкой.



